( * indicates equally leading, + indicates equally advising)
Lingxiao Guo, Zhengrong Xue, Zijing Xu, Huazhe Xu
DemoSpeedup: Accelerating Visuomotor Policies via Entropy-Guided Demonstration Acceleration
Conference on Robot Learning (CoRL), 2025. (oral)
Botian Xu*, Haoyang Weng*, Qingzhou Lu*, Yang Gao, Huazhe Xu
FACET: Force-Adaptive Control via Impedance Reference Tracking for Legged Robots
Conference on Robot Learning (CoRL), 2025. (oral)
Suning Huang*, Zheyu Zhang*, Tianhai Liang, Yihan Xu, Zhehao Kou, Chenhao Lu, Guowei Xu, Zhengrong Xue, Huazhe Xu
MENTOR: Mixture-of-Experts Network with Task-Oriented Perturbation for Visual Reinforcement Learning
International Conference on Machine Learning (ICML), 2025.
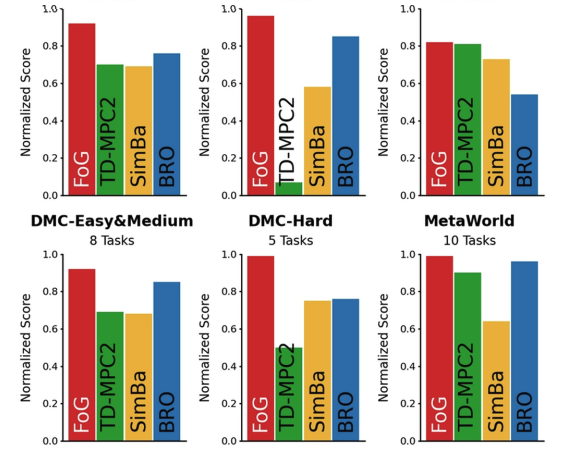
Zilin Kang*, Chenyuan Hu*, Yu Luo, Zhecheng Yuan, Ruijie Zheng, Huazhe Xu Huazhe Xu
A Forget-and-Grow Strategy for Deep Reinforcement Learning Scaling in Continuous Control
International Conference on Machine Learning (ICML), 2025.
Zhengrong Xue*, Shuying Deng*, Zhenyang Chen, Yixuan Wang, Zhecheng Yuan, Huazhe Xu
DemoGen: Synthetic Demonstration Generation for Data-Efficient Visuomotor Policy Learning
Robotics: Science and Systems (RSS), 2025. (best long paper@CVPR'25 workshop)
Han Zhang, Songbo Hu, Zhecheng Yuan, Huazhe Xu
DOGlove: Dexterous Manipulation with a Low-Cost Open-Source Haptic Force Feedback Glove
Robotics: Science and Systems (RSS), 2025.
Han Xue*, Jieji Ren*, Wendi Chen*, Gu Zhang, Yuan Fang, Guoying Gu, Huazhe Xu+,Cewu Lu+
Reactive Diffusion Policy: Slow-Fast Visual-Tactile Policy Learning for Contact-Rich Manipulation
Robotics: Science and Systems (RSS), 2025. (best student paper finalist, best paper@ICRA'25 workshop)
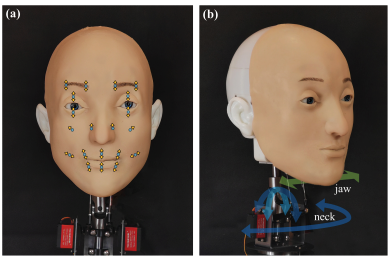
Zongzheng Zhang*, Jiawen Yang*, Ziqiao Peng, Meng Yang, Jianzhu Ma, Lin Cheng, Huazhe Xu, Hang Zhao, Hao Zhao
Morpheus: A Neural-driven Animatronic Face with Hybrid Actuation and Diverse Emotion Control
Robotics: Science and Systems (RSS), 2025.

Yu Qi*, Yuanchen Ju*, Tianming Wei, Chi Chu, Lawson LS Wong, Huazhe Xu
Two by Two: Learning multi-task pairwise objects assembly for generalizable robot manipulation
Conference on Computer Vision and Pattern Recognition (CVPR), 2025.

Guoping Pan*, Qingwei Ben*, Zhecheng Yuan, Guangqi Jiang, Yandong Ji, Jiangmiao Pang, Houde Liu, Huazhe Xu
RoboDuet: A Framework Affording
Mobile-Manipulation and Cross-Embodiment
IEEE Robotics and Automation Letters (RA-L) with a presentation at IROS'25.
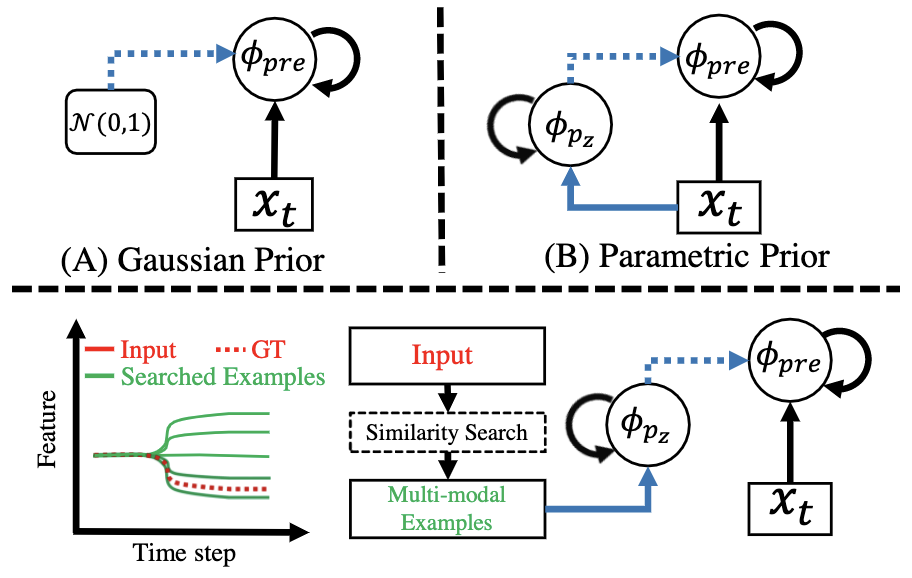
Kaizhe Hu*, Zihang Rui*, Yao He, Yuyao Liu, Pu Hua, Huazhe Xu
Stem-OB: Generalizable Visual Imitation Learning with Stem-Like Convergent Observation through Diffusion Inversion
International Conference on Learning Representation (ICLR), 2025. (spotlight)
Junzhe Zhu*, Yuanchen Ju*, Junyi Zhang, Muhan Wang, Zhecheng Yuan, Kaizhe Hu, Huazhe Xu
DenseMatcher: Learning 3D Semantic Correspondence for Category-Level Manipulation from a Single Demo
International Conference on Learning Representation (ICLR), 2025. (spotlight)
Guangqi Jiang*, Yifei Sun*, Tao Huang*, Huanyu Li, Yongyuan Liang+, Huazhe Xu+
Robots Pre-Train Robots: Manipulation- Centric Robotic Representation from Large- Scale Robot Datasets
International Conference on Learning Representation (ICLR), 2025.
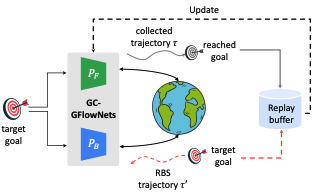
Haoran He, Can Chang, Huazhe Xu, Ling Pan
Looking Backward: Retrospective Backward Synthesis for Goal-Conditioned GFlowNets
International Conference on Learning Representation (ICLR), 2025.
Zeyuan Liu*, Ziyu Huan*, Xiyao Wang, Jiafei Lyu, Jian Tao, Xiu Li+,
Furong Huang+, Huazhe Xu+
World Models with Hints of Large Language Models
for Goal Achieving
Annual Conference of the Nations of the Americas Chapter of the Association for Computational Linguistics (NAACL), 2025.
Yuanhang Zhang*, Tianhai Liang*, Zhenyang Chen, Yanjie Ze, Huazhe Xu
Catch It! Learning to Catch in Flight with Mobile Dexterous Hands
International Conference on Robot Automation (ICRA), 2025. (outstanding paper nomination at CORL LFDM workshop)
Ruiqian Nai, Jiacheng You, Liu Cao, Hanchen Cui, Shiyuan Zhang, Huazhe Xu, Yang Gao
Fine-Tuning Hard-to-Simulate Objectives for Quadruped Locomotion: A Case Study on Total Power Saving
International Conference on Robot Automation (ICRA), 2025.
Jikai Xu*, Lei Wu*, Changyi Lin, Ding Zhao, and Huazhe Xu
DTactive: A Vision-Based Tactile Sensor with Active Surface
International Conference on Intelligent Robots and Systems (IROS), 2025w.
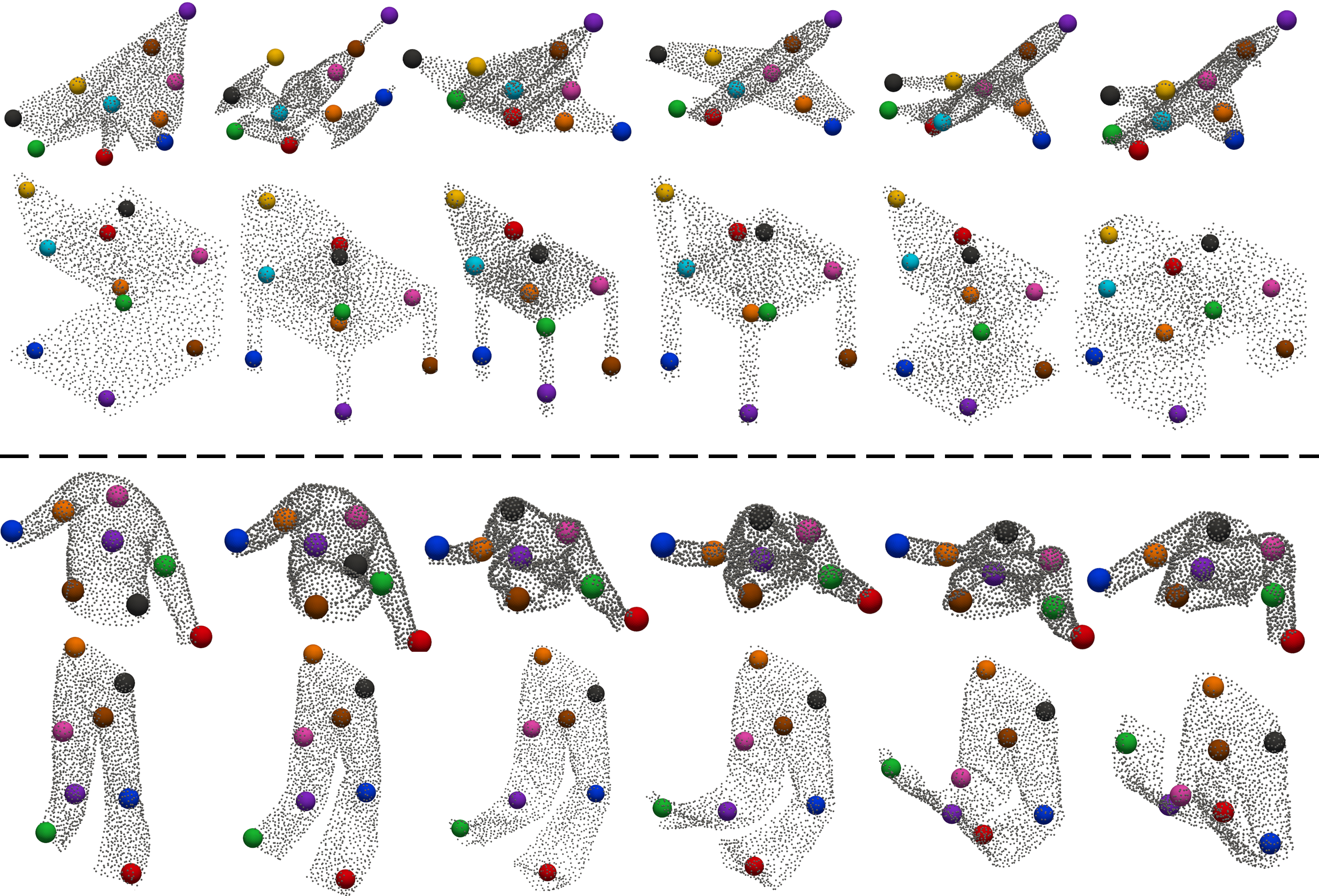
Chengkai Hou, Zhengrong Xue, Bingyang Zhou, Jinghan Ke, Shao Lin, Huazhe Xu
Key-Grid: Unsupervised 3D Keypoints Detection using Grid Heatmap Features
Conference on Neural Information Processing Systems Datasets & Benchmarks Track (NeurIPS), 2024.
Yongyuan Liang, Tingqiang Xu, Kaizhe Hu, Guangqi Jiang, Furong Huang, Huazhe Xu
Make-An-Agent: A Generalizable Policy Network Generator with Behavior-Prompted Diffusion
Conference on Neural Information Processing Systems Datasets & Benchmarks Track (NeurIPS), 2024.
Zhecheng Yuan*, Tianming Wei*, Shuiqi Cheng, Gu Zhang, Yuanpei Chen, Huazhe Xu
Learning to Manipulate Anywhere: A Visual Generalizable Framework For Reinforcement Learning
Conference on Robot Learning (CoRL), 2024.
Chongkai Gao, Zhengrong Xue, Shuying Deng, Tianhai Liang, Siqi Yang, Lin Shao, Huazhe Xu
RiEMann: Near Real-Time SE(3)-Equivariant Robot Manipulation without Point Cloud Segmentation
Conference on Robot Learning (CoRL), 2024.
Pu Hua*, Minghuan Liu*, Annabella Macaluso*, Yunfeng Lin, Weinan Zhang, Huazhe Xu, Lirui Wang
GenSim2: Scaling Robotic Data Generation with Multi-modal and Reasoning LLMs
Conference on Robot Learning (CoRL), 2024.
Yuanchen Ju*, Kaizhe Hu*, Guowei Zhang, Gu Zhang, Mingrun Jiang, Huazhe Xu
Robo-ABC: Affordance Generalization Beyond Categories via Semantic Correspondence for Robot Manipulation
European Conference on Computer Vision (ECCV), 2024.
Tao Huang*, Guangqi Jiang*, Yanjie Ze, Huazhe Xu
Diffusion Reward: Learning Rewards via Conditional Video Diffusion
European Conference on Computer Vision (ECCV), 2024.

Zhengmao He, Kun Lei, Yanjie Ze, Koushil Sreenath, Zhongyu Li, Huazhe Xu
Learning Visual Quadrupedal Loco-Manipulation from Demonstrations
International Conference on Intelligent Robots and Systems (IROS), 2024.
Yanjie Ze*, Gu Zhang*, Kangning Zhang, Chenyuan Hu, Muhan Wang, Huazhe Xu
3D Diffusion Policy
Robotics: Science and Systems (RSS), 2024.
Tianying Ji*, Yongyuan Liang*, Yan Zeng, Yu Luo, Guowei Xu, Jiawei Guo, Ruijie Zheng, Furong Huang, Fuchun Sun, Huazhe Xu
ACE: Off-Policy Actor-Critic with Causality-Aware Entropy Regularization
International Conference on Machine Learning (ICML), 2024. (oral)
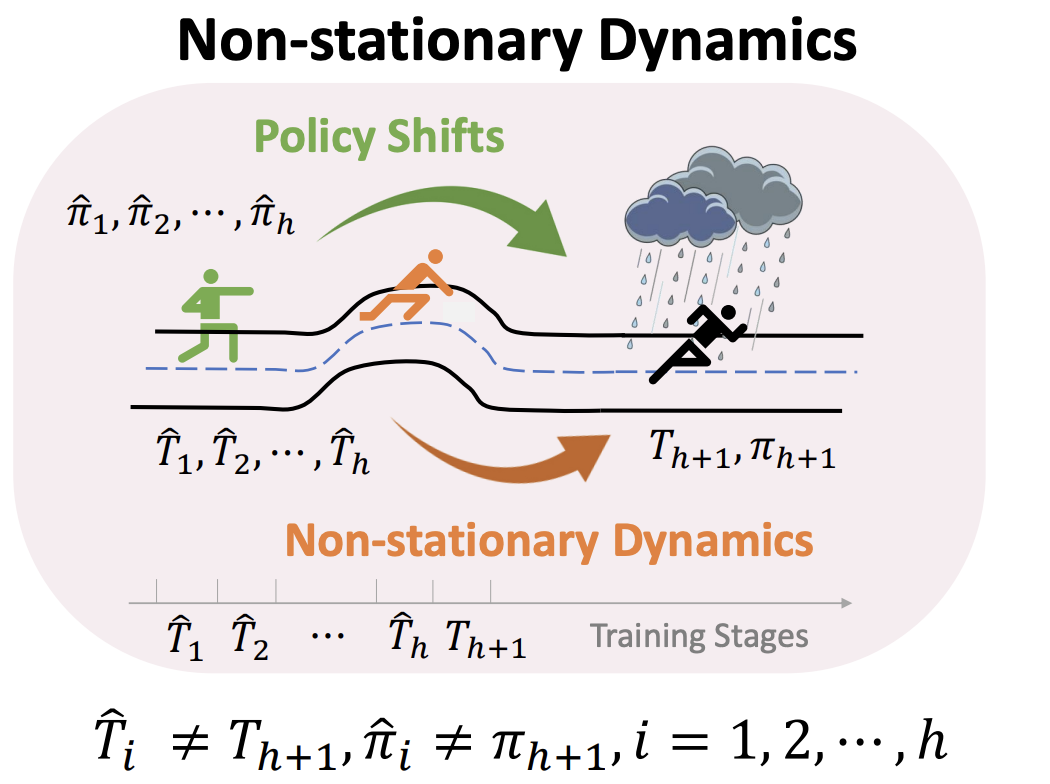
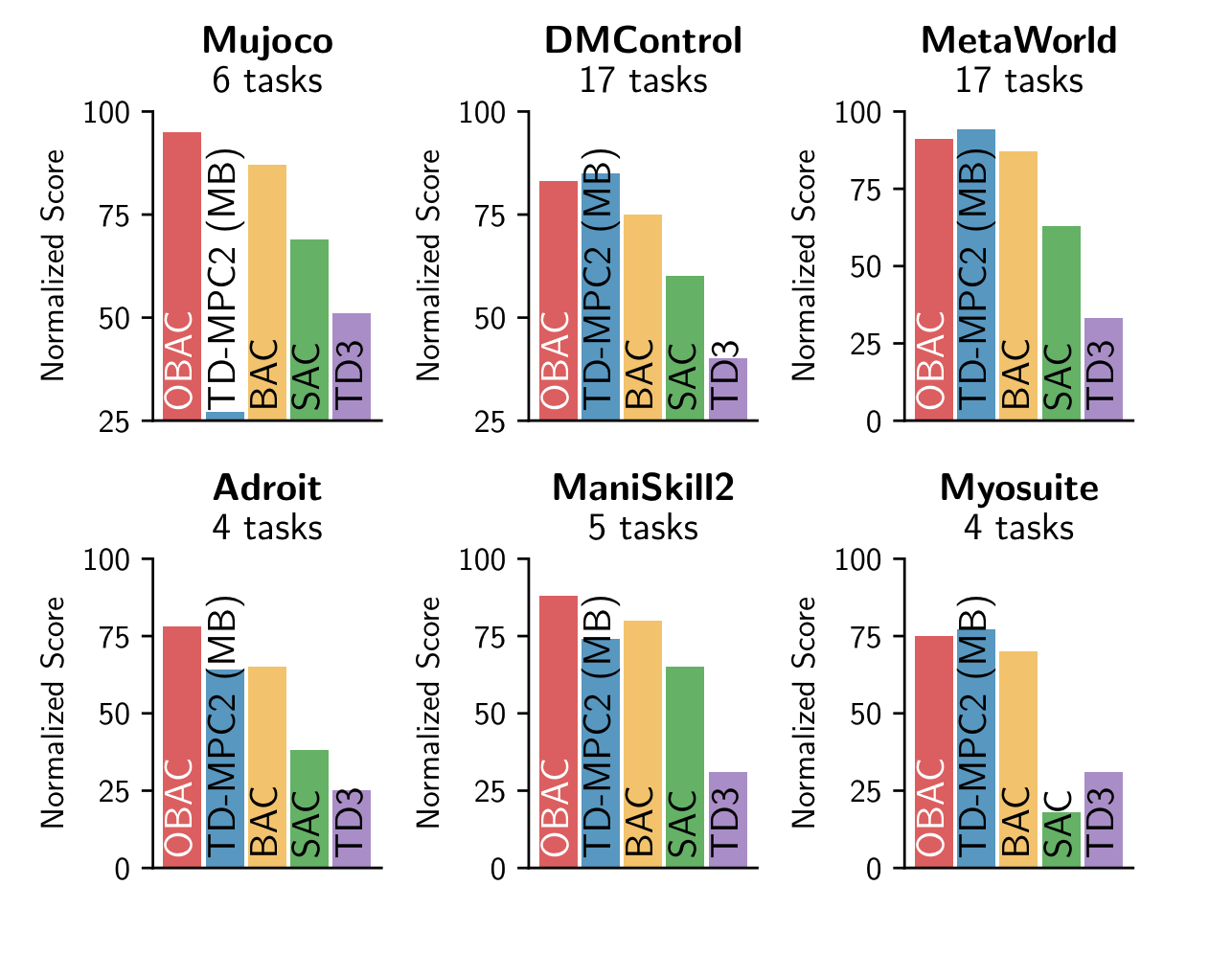
Yu Luo, Tianying Ji, Fuchun Sun, Jianwei Zhang, Huazhe Xu, Xianyuan Zhan
Offline-Boosted Actor-Critic:Adaptively Blending Optimal Historical Behaviors in Deep Off-Policy RL
International Conference on Machine Learning (ICML), 2024.

Tianying Ji, Yu Luo, Fuchun Sun, Xianyuan Zhan, Jianwei Zhang, Huazhe Xu.
Seizing Serendipity: Exploiting the Value of Past Success in Off-Policy Actor-Critic
International Conference on Machine Learning (ICML), 2024.
Ruijie Zheng, Yongyuan Liang, Xiyao Wang, Shuang Ma, Hal Daumé III, Huazhe Xu, John Langford, Praveen Palanisamy, Kalyan Shankar Basu, Furong Huang.
Premier-TACO is a Few-Shot Policy Learner: Pretraining Multitask Representation via Temporal Action-Driven Contrastive Loss
International Conference on Machine Learning (ICML), 2024.
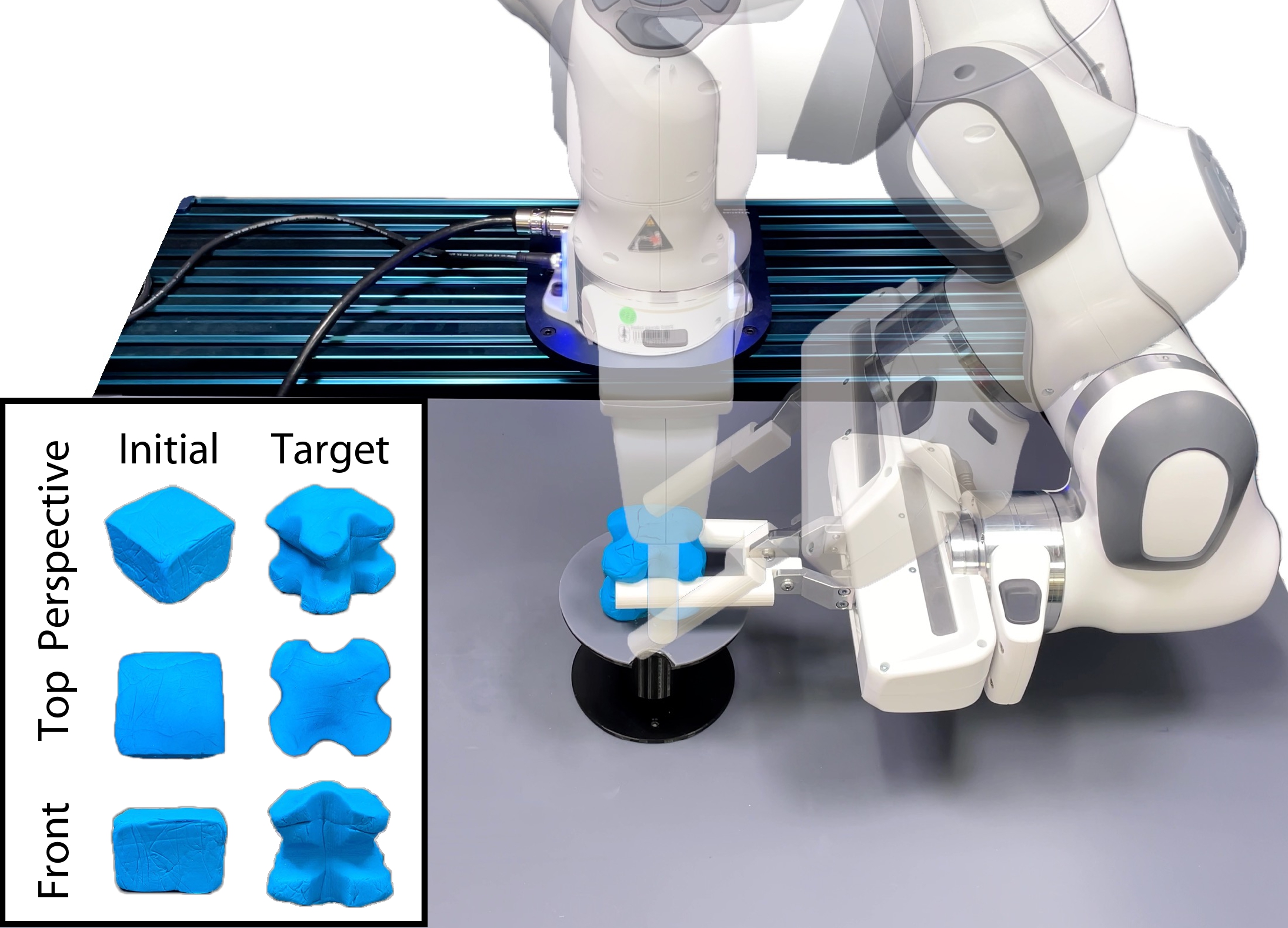
Zhengrong Xue*, Han Zhang*, Jingwen Cheng, Zhengmao He, Yuanchen Ju, Changyi Lin, Gu Zhang, Huazhe Xu
ArrayBot: Reinforcement Learning for Generalizable Distributed Manipulation through Touch
International Conference on Robot Automation (ICRA), 2024.
Dehao Wei, Huazhe Xu
A Wearable Robotic Hand for Hand-over-Hand Imitation Learning
International Conference on Robot Automation (ICRA), 2024.
Chenchang Li*, Zihao Ai*, Tong Wu, Xiaosa Li, Wenbo Ding+, Huazhe Xu+
DeformNet: Latent Space Modeling and Dynamics Prediction for Deformable Object Manipulation
International Conference on Robot Automation (ICRA), 2024.
Guowei Xu*, Ruijie Zheng*, Yongyuan Liang*, Xiyao Wang, Zhecheng Yuan, Tianying Ji, Yu Luo, Xiaoyu Liu, Jiaxin Yuan, Pu Hua, Shuzhen Li, Yanjie Ze, Hal Daumé III, Furong Huang, Huazhe Xu
DrM: Mastering Visual Reinforcement Learning through Dormant Ratio Minimization
International Conference on Learning Representation (ICLR), 2024. (spotlight, top 5%)
Lirui Wang, Yiyang Ling*, Zhecheng Yuan*, Mohit Shridhar, Chen Bao, Yuzhe Qin, Bailin Wang, Huazhe Xu, Xiaolong Wang
GenSim: Generating Robotic Simulation Tasks via Large Language Models
International Conference on Learning Representation (ICLR), 2024. (spotlight, top 5%)
Abridged version in LangRob Workshop@CoRL'23 (outstanding paper award).
Kun Lei, Zhengmao He*, Chenhao Lu*, Kaizhe Hu, Yang Gao, Huazhe Xu
Uni-O4: Unifying Online and Offline Deep Reinforcement Learning with Multi-Step Policy Optimization
International Conference on Learning Representation (ICLR), 2024.
Ruizhe Shi*, Yuyao Liu*, Yanjie Ze, Simon S. Du, Huazhe Xu
Unleashing the Power of Pre-trained Language Models for Offline Reinforcement Learning
International Conference on Learning Representation (ICLR), 2024.
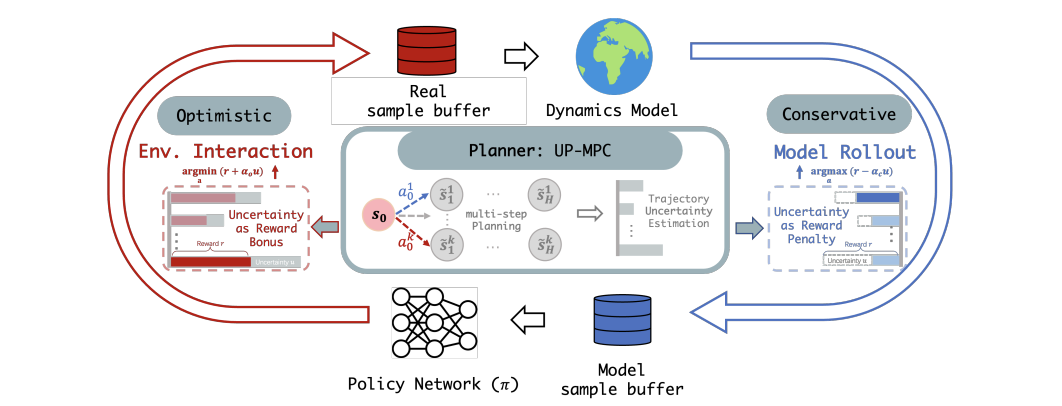
Xiyao Wang, Ruijie Zheng, Yanchao Sun, Ruonan Jia, Wichayaporn Wongkamjan, Huazhe Xu, Furong Huang
COPlanner: Plan to Roll Out Conservatively but to Explore Optimistically for Model-Based RL
International Conference on Learning Representation (ICLR), 2024.
Ziyu Wang*, Yanjie Ze*, Yifei Sun, Zhecheng Yuan, Huazhe Xu
Generalizable Visual Reinforcement Learning with Segment Anything Model
arXiv preprint.
Changyi Lin, Han Zhang, Jikai Xu, Lei Wu, Huazhe Xu
9DTact: A Compact Vision-Based Tactile Sensor for Accurate 3D Shape Reconstruction and Generalizable 6D Force Estimation
IEEE Robotics and Automation Letters (RA-L) with a presentation at ICRA'24.
Haochen Shi*, Huazhe Xu*, Zhiao Huang, Yunzhu Li, Jiajun Wu.
RoboCraft: Learning to See, Simulate, and Shape Elasto-Plastic Objects in 3D with Graph Networks
International Journal of Robotics Research (IJRR).(acceptance rate: 5.3%; IF: 6.887)
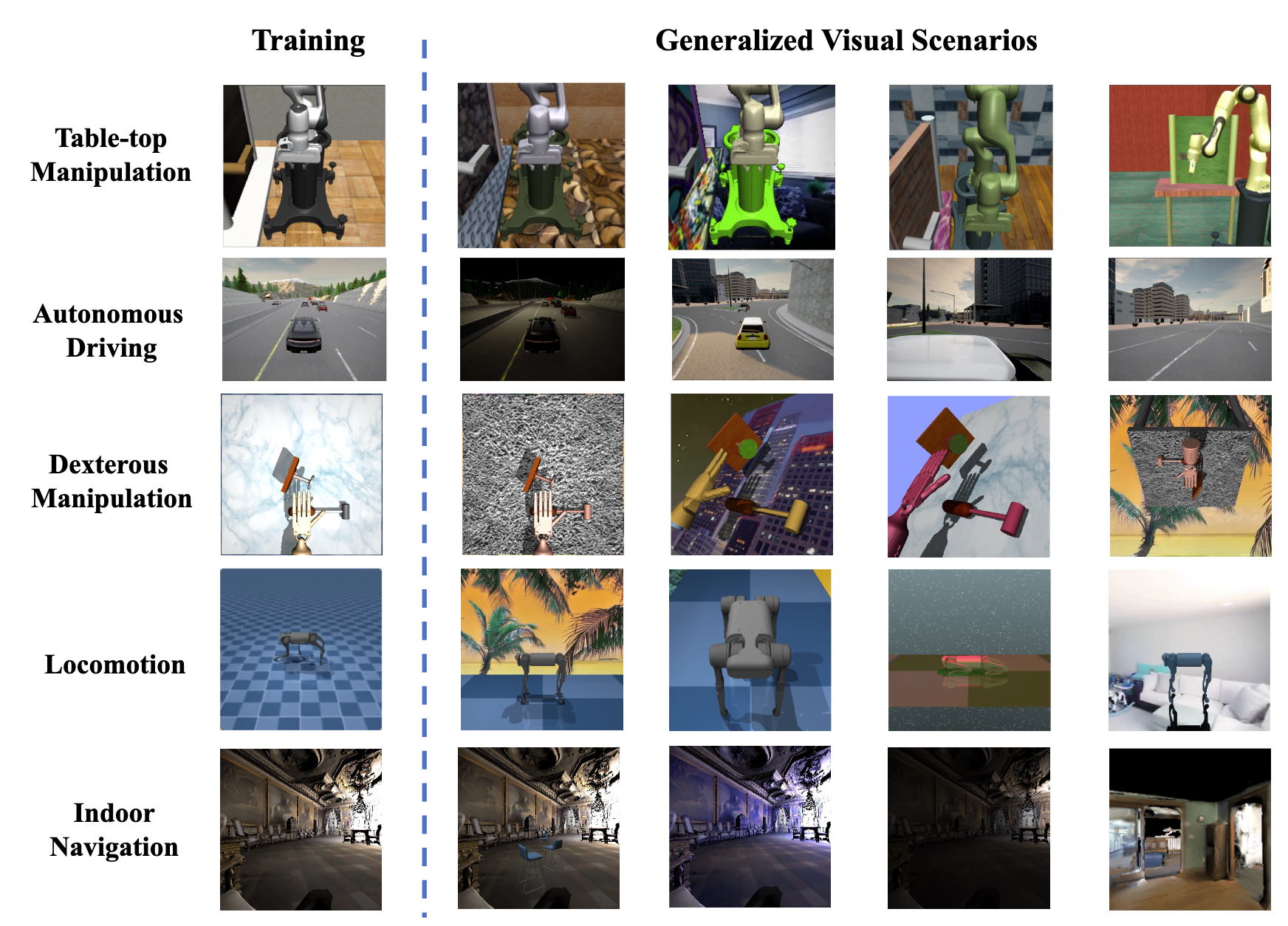
Zhecheng Yuan*, Sizhe Yang*, Pu Hua, Can Chang, Kaizhe Hu, Huazhe Xu
RL-ViGen: A Reinforcement Learning Benchmark for Visual Generalization
Conference on Neural Information Processing Systems Datasets & Benchmarks Track (NeurIPS), 2023.
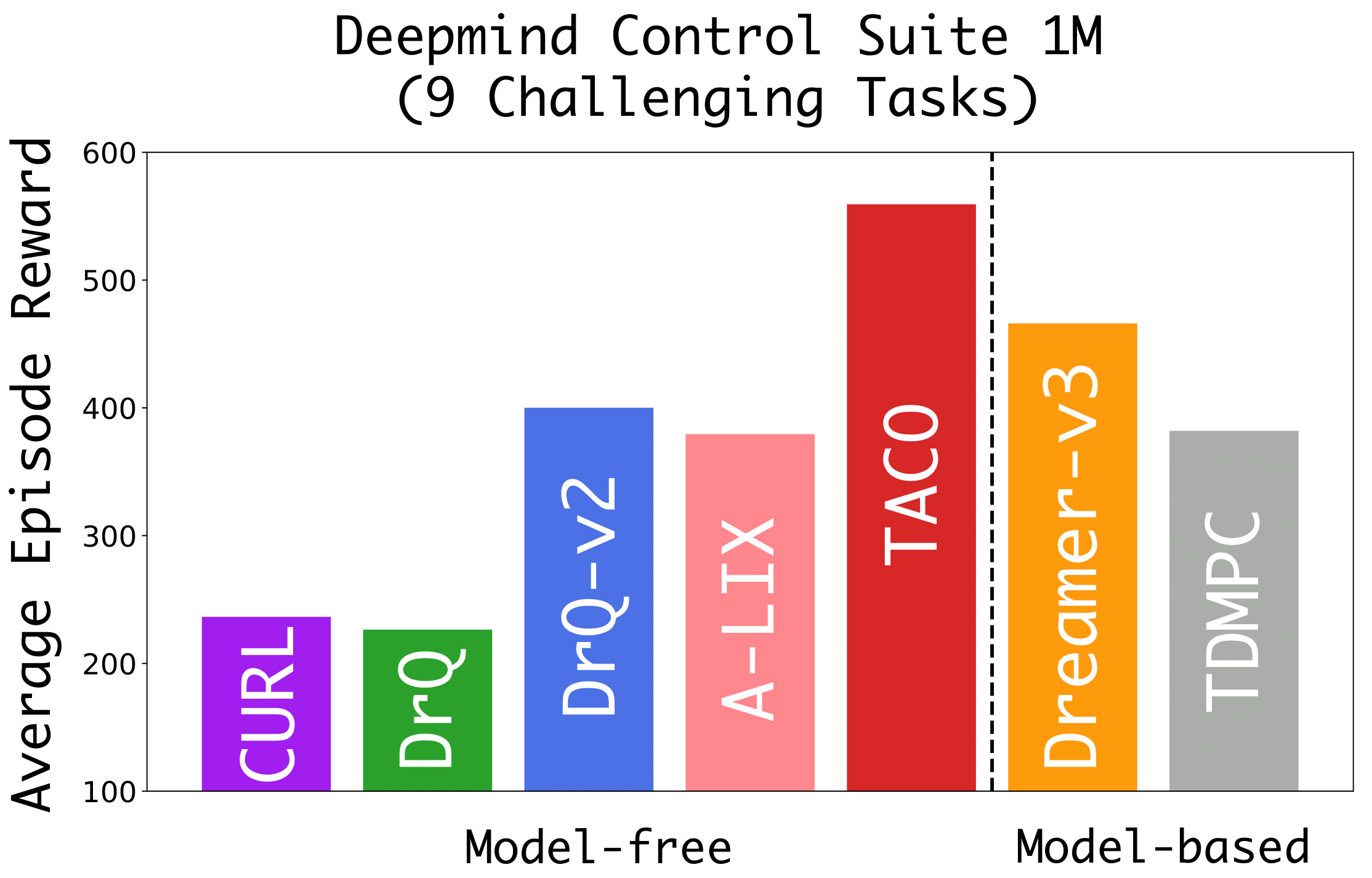
Ruijie Zheng, Xiyao Wang, Yanchao Sun, Shuang Ma, Jieyu Zhao, Huazhe Xu+, Hal Daumé III+, Furong Huang+
TACO: Temporal Latent Action-Driven Contrastive Loss for Visual Reinforcement Learning
Conference on Neural Information Processing Systems (NeurIPS), 2023.
Jialu Gao*, Kaizhe Hu*, Guowei Xu, Huazhe Xu
Can Pre-Trained Text-to-Image Models Generate
Visual Goals for Reinforcement Learning?
Conference on Neural Information Processing Systems (NeurIPS), 2023.
Sizhe Yang*, Yanjie Ze*, Huazhe Xu
MoVie: Visual Model-Based Policy Adaptation
for View Generalization
Conference on Neural Information Processing Systems (NeurIPS), 2023.
Yanjie Ze, Yuyao Liu*, Ruizhe Shi*, Jiaxin Qin, Zhecheng Yuan, Jiashun Wang, Huazhe Xu
H-InDex: Visual Reinforcement Learning with Hand-Informed Representations for Dexterous Manipulation
Conference on Neural Information Processing Systems (NeurIPS), 2023.
Haochen Shi*, Huazhe Xu*, Samuel Clarke, Yunzhu Li, Jiajun Wu
RoboCook: Long-Horizon Elasto-Plastic Object Manipulation with Diverse Tools
Conference on Robot Learning (CoRL), 2023. (best system paper award, oral)
Zhengrong Xue, Zhecheng Yuan, Jiashun Wang, Xueqian Wang, Yang Gao, Huazhe Xu.
USEEK: Unsupervised SE(3)-Equivariant 3D Keypoints for Generalizable Manipulation
International Conference on Robot Automation (ICRA), 2023.
Changyi Lin, Ziqi Lin, Shaoxiong Wang, Huazhe Xu.
DTact: A Vision-Based Tactile Sensor that Measures High-Resolution 3D Geometry Directly from Darkness
International Conference on Robot Automation (ICRA), 2023.
Ray Chen Zheng*, Kaizhe Hu*, Zhecheng Yuan, Boyuan Chen, Huazhe Xu.
Extraneousness-Aware Imitation Learning
International Conference on Robot Automation (ICRA), 2023.
Yunfei Li*, Chaoyi Pan*, Huazhe Xu, Xiaolong Wang, Yi Wu.
Efficient Bimanual Handover and Rearrangement via Symmetry-Aware Actor-Critic Learning
International Conference on Robot Automation (ICRA), 2023.
Pu Hua, Yubei Chen+, Huazhe Xu+.
Simple Emergent Action Representations
from Multi-Task Policy Training
International Conference on Learning Representation (ICLR), 2023.
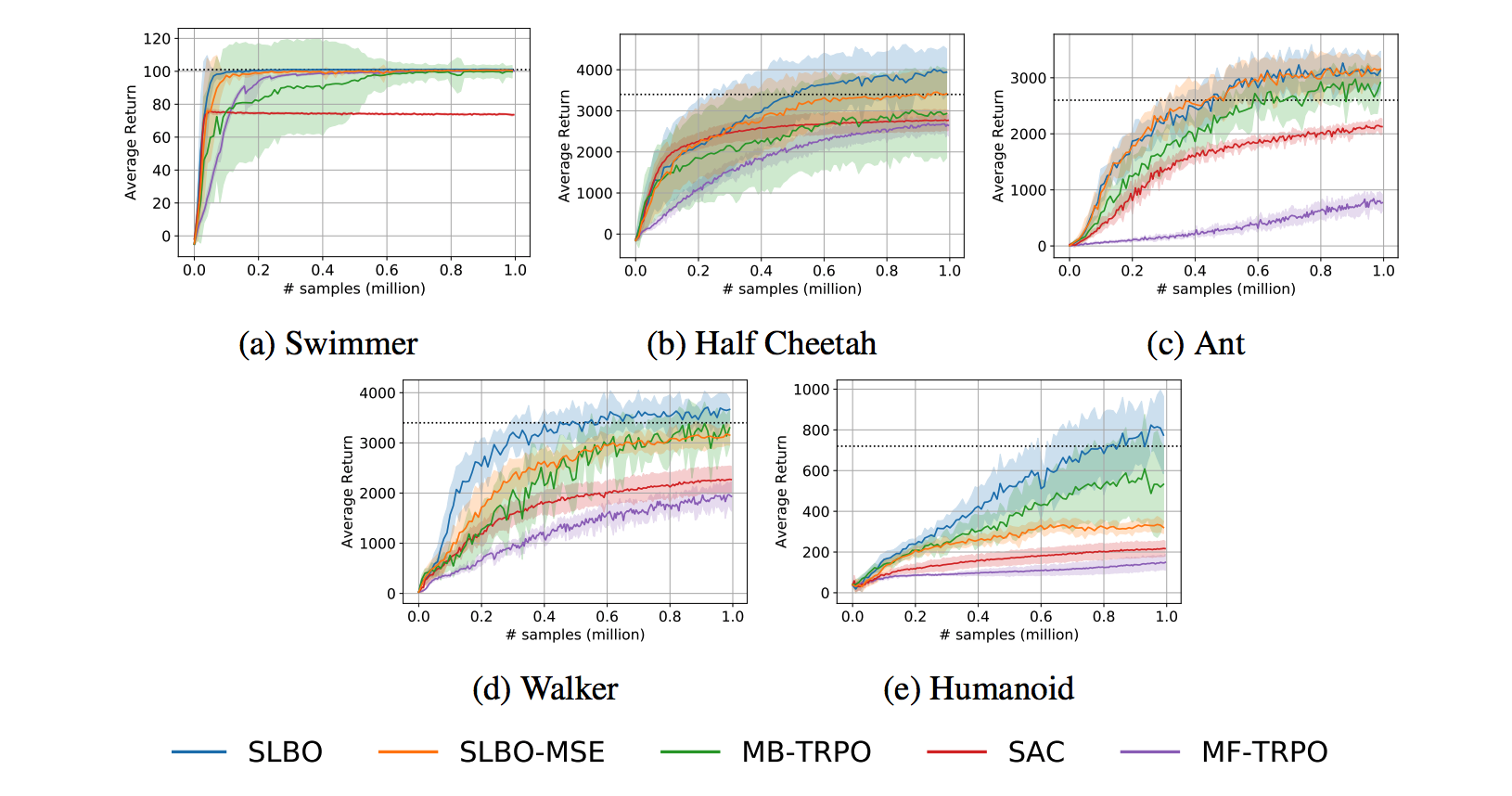
Ruijie Zheng*, Xiyao Wang*, Huazhe Xu, Furong Huang.
Is Model Ensemble Necessary? Model-based RL via a Single Model with Lipschitz Regularized Value Function
International Conference on Learning Representation (ICLR), 2023.
Abridged in NeurIPS 2022 DRL workshop (spotlight).
[arXiv] [project page] [code coming soon]
Zhecheng Yuan, Zhengrong Xue, Bo Yuan, Xueqian Wang, Yi Wu, Yang Gao, Huazhe Xu.
Pre-Trained Image Encoder for Generalizable Visual Reinforcement Learning
Conference on Neural Information Processing Systems (NeurIPS), 2022. (spotlight)
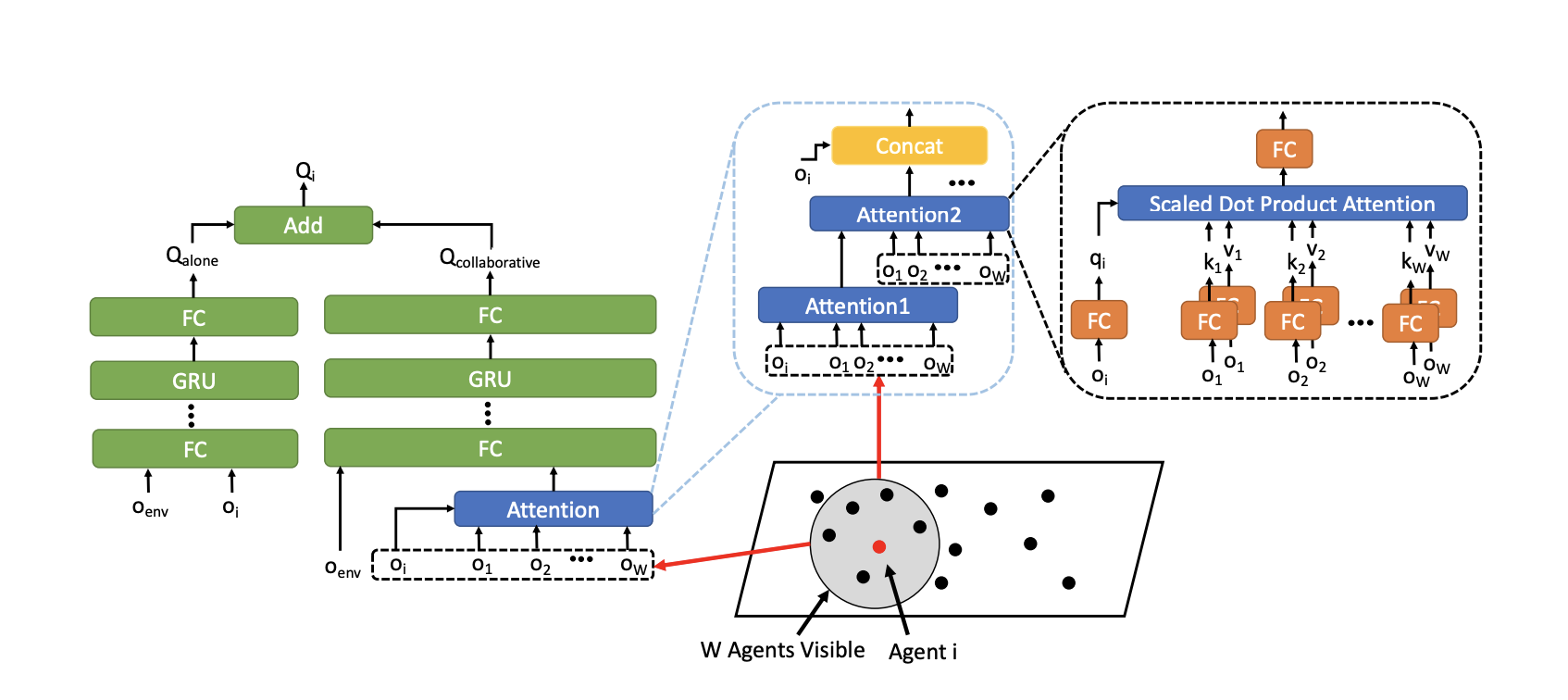
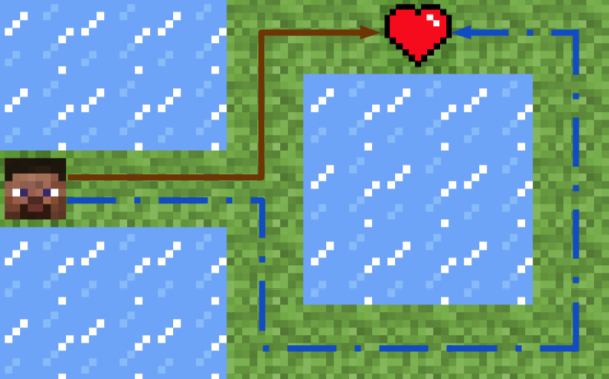
Can Chang, Ni Mu, Jiajun Wu, Ling Pan, Huazhe Xu.
E-MAPP: Efficient Multi-Agent Reinforcement Learning with Parallel Program Guidance
Conference on Neural Information Processing Systems (NeurIPS), 2022. (spotlight)
Haoyu Xiong, Haoyuan Fu, Jieyi Zhang, Chen Bao, Qiang Zhang, Yongxi Huang, Wenqiang Xu, Animesh Garg, Huazhe Xu, Cewu Lu
RoboTube: Learning Household Manipulation from Human Videos with Simulated Twin Environments
RSS Workshop, 2022.
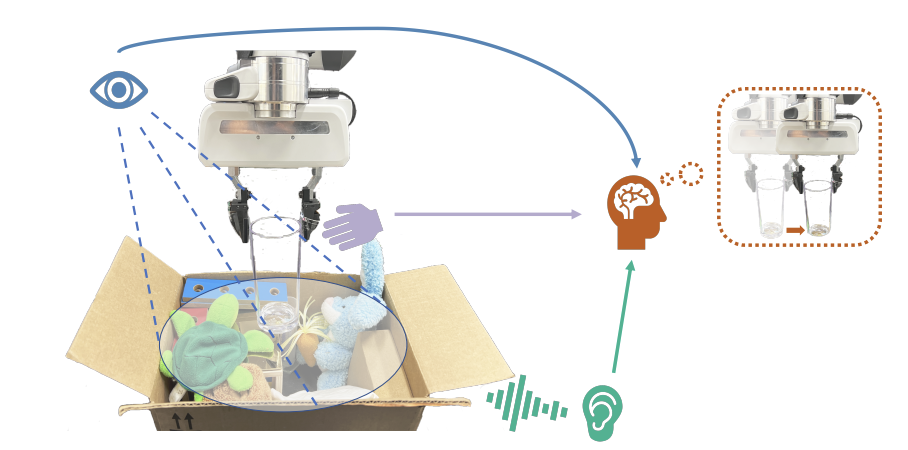
Hao Li, Yizhi Zhang, Junzhe Zhu, Shaoxiong Wang, Michelle A Lee, Huazhe Xu, Edward Adelson, Li Fei-Fei, Ruohan Gao, Jiajun Wu.
See, Hear, and Feel: Smart Sensory Fusion for Robotic Manipulation
International Conference on Robots Learning (CORL), 2022.

Yixing Wang*, Sifan Ye*, Jiaman Li, Dennis Lee, Karen Liu, Huazhe Xu+, Jiajun Wu+.
Scene Synthesis from Human Motion
Siggraph Asia, 2022.
Huazhe Xu, Yuping Luo, Shaoxiong Wang, Trevor Darrell, Roberto Calandra.
Towards Learning to Play Piano with Dexterous Hands and Touch
International Conference on Intelligent Robots and Systems (IROS), 2022.

Ling Pan, Longbo Huang, Tengyu Ma, Huazhe Xu.
Plan Better amid Conservatism: Offline Multi-agent Reinforcement Learning with Actor Rectification
International Conference on Machine Learning (ICML), 2022.
Yunfei Li, Tian Gao, Jiaqi Yang, Huazhe Xu, Yi Wu.
Phasic Self-Imitative Reduction for Sparse-Reward Goal-Conditioned Reinforcement Learning
International Conference on Machine Learning (ICML), 2022.
Haochen Shi*, Huazhe Xu*, Zhiao Huang, Yunzhu Li, Jiajun Wu.
RoboCraft: Learning to See, Simulate, and Shape Elasto-Plastic Objects with Graph Networks
Robotics: Science and Systems (RSS), 2022.

Zhecheng Yuan, Guozheng Ma, Yao Mu, Bo Xia, Bo Yuan, Xueqian Wang, Ping Luo, Huazhe Xu.
Don't Touch What Matters: Task-Aware Lipschitz Data Augmentation for Visual Reinforcement Learning
International Joint Conference on Artificial Intelligence (IJCAI), 2022.

Ruihan Yang*, Minghao Zhang*, Nicklas Hansen, Huazhe Xu, Xiaolong Wang.
Learning Vision-Guided Quadrupedal Locomotion End-to-End with Cross-Modal Transformers
International Conference on Learning Representation (ICLR), 2022. (spotlight)
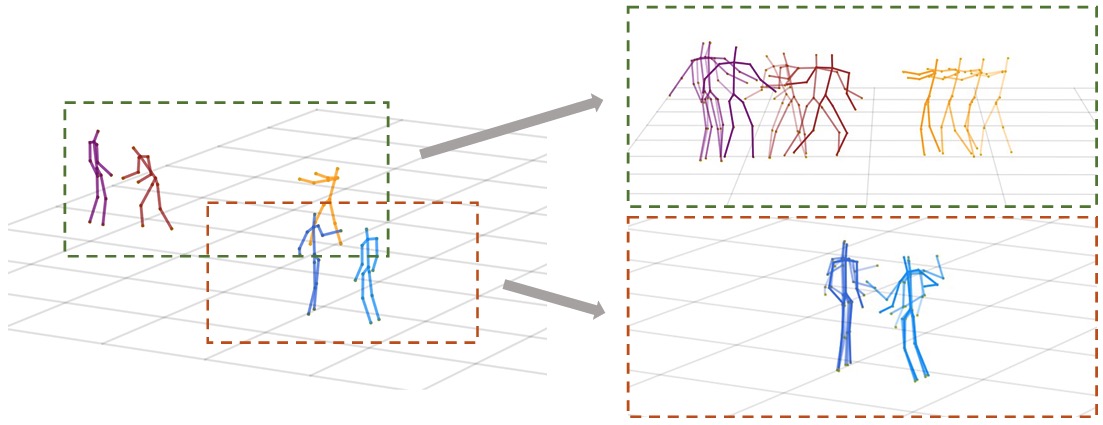
Jiashun Wang, Huazhe Xu, Medhini Narasimhan, Xiaolong Wang.
Multi-Person 3D Motion Prediction with Multi-Range Transformers.
Conference on Neural Information Processing Systems (NeurIPS), 2021.
Minghao Zhang*, Pingcheng Jian*, Yi Wu, Huazhe Xu, Xiaolong Wang.
Disentangled Attention as Intrinsic Regularization for Bimanual Multi-Object Manipulation
Arxiv Preprints.
Huazhe Xu*, Boyuan Chen*, Yang Gao, Trevor Darrell.
Zero-shot Policy Learning with Spatial Temporal Reward Decomposition on Contingency-aware Observation
International Conference on Robot Automation (ICRA), 2021.

Jiashun Wang, Huazhe Xu, Jingwei Xu, Sifei Liu, Xiaolong Wang.
Synthesizing Long-Term 3D Human Motion and Interaction in 3D Scenes.
Conference on Computer Vision and Pattern Recognition (CVPR), 2021.

Yunfei Li, Huazhe Xu, Yilin Wu, Xiaolong Wang, Yi Wu.
Solving Compositional Reinforcement Learning Problems via Task Reduction.
International Conference on Learning Representations (ICLR), 2021.
Zhenggang Tang, Chao Yu, Boyuan Chen, Huazhe Xu, Xiaolong Wang, Fei Fang, Simon Shaolei Du, Yu Wang, Yi Wu.
Discovering Diverse Multi-Agent Strategic Behavior via Reward Randomization.
International Conference on Learning Representations (ICLR), 2021.
Ruihan Yang, Huazhe Xu, Yi Wu, Xiaolong Wang.
Multi-Task Reinforcement Learning with Soft Modularization.
Conference on Neural Information Processing Systems (NeurIPS), 2020.
Jingwei Xu*, Huazhe Xu*, Bingbing Ni, Xiaokang Yang, Xiaolong Wang, Trevor Darrell.
Hierarchical Style-based Networks for Motion Synthesis.
European Conference on Computer Vision (ECCV), 2020.
Jingwei Xu*, Huazhe Xu*, Bingbing Ni, Xiaokang Yang, Trevor Darrell.
Video Prediction via Demonstration Guidance
International Conference on Machine Learning (ICML), 2020. (oral)
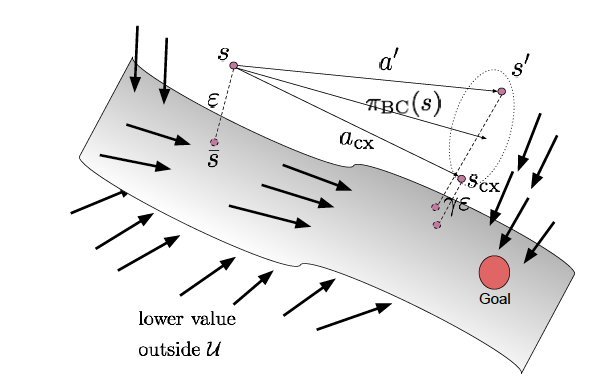
Yuping Luo, Huazhe Xu, Tengyu Ma.
Learning Self-Correctable Policies and Value Functions from Demonstrations with Negative Sampling,
International Conference on Learning Representation (ICLR), 2020.
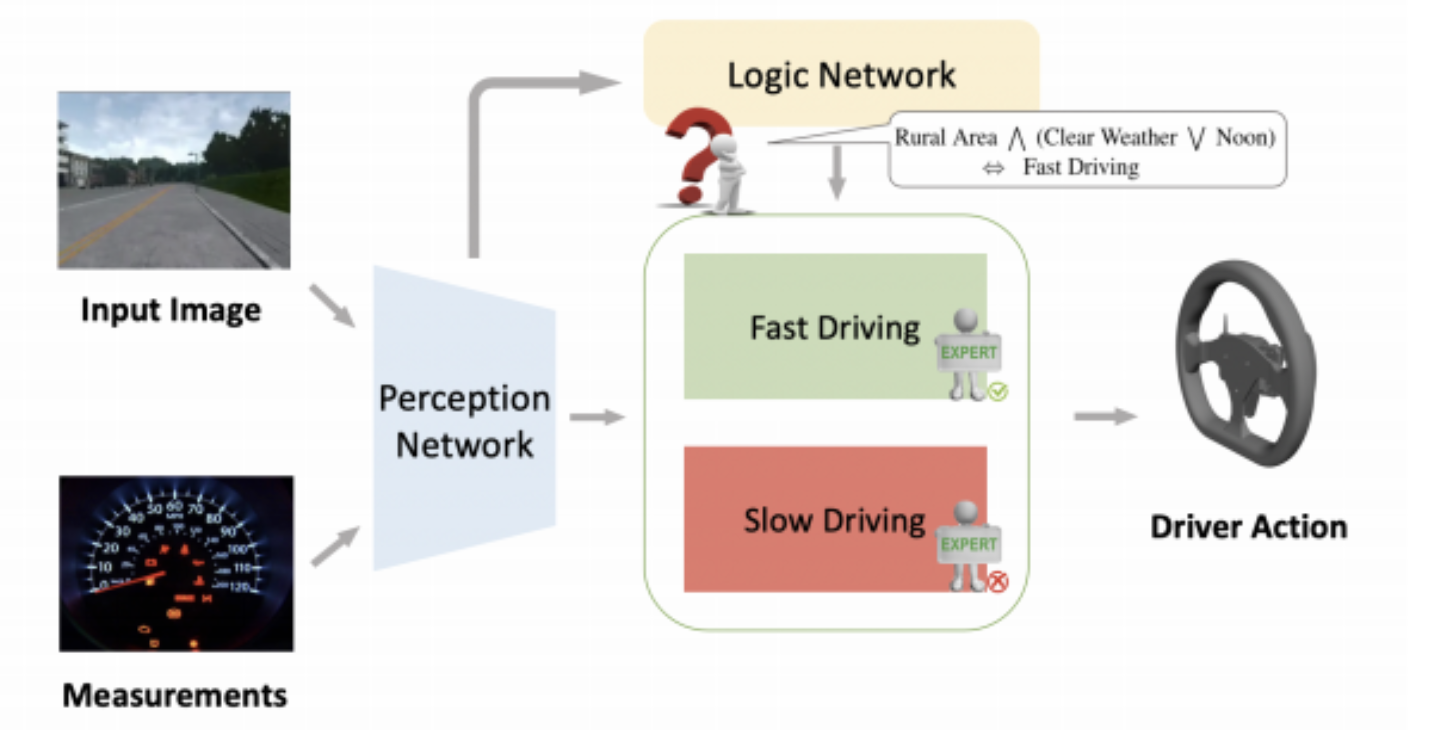
Jierui Lin*, Yifei Xing*, Huazhe Xu, Yang Gao.
Learning a Perception-Logic Network for Unsupervised Scene Conditioned Driving Behavior,
Robotics: Science and Systems IDA workshop (RSS workshop), 2020.
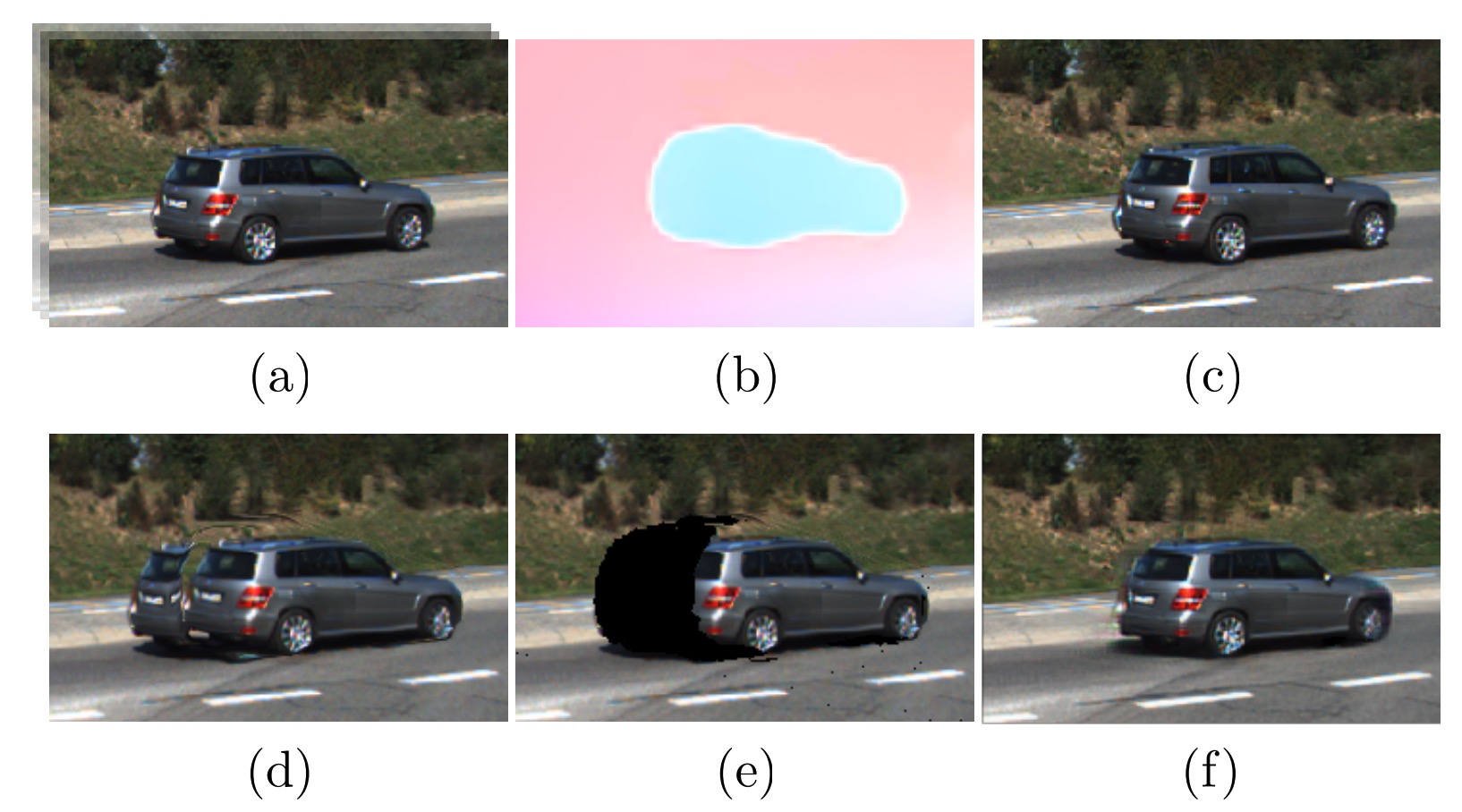
Hang Gao*, Huazhe Xu*, Qi-zhi Cai, Ruth Wang, Fisher Yu, Trevor Darrell.
Disentangling Propagationand Generation for Video Prediction,
International Conference on Computer Vision (ICCV), 2019.
Yang Gao*,Huazhe Xu*, Fisher Yu, Sergey Levine, Trevor Darrell.
Reinforcement Learning from Imperfect Demonstrations,
Neurips 2018 Deep RL Symposium (Neurips Symposium), 2018.
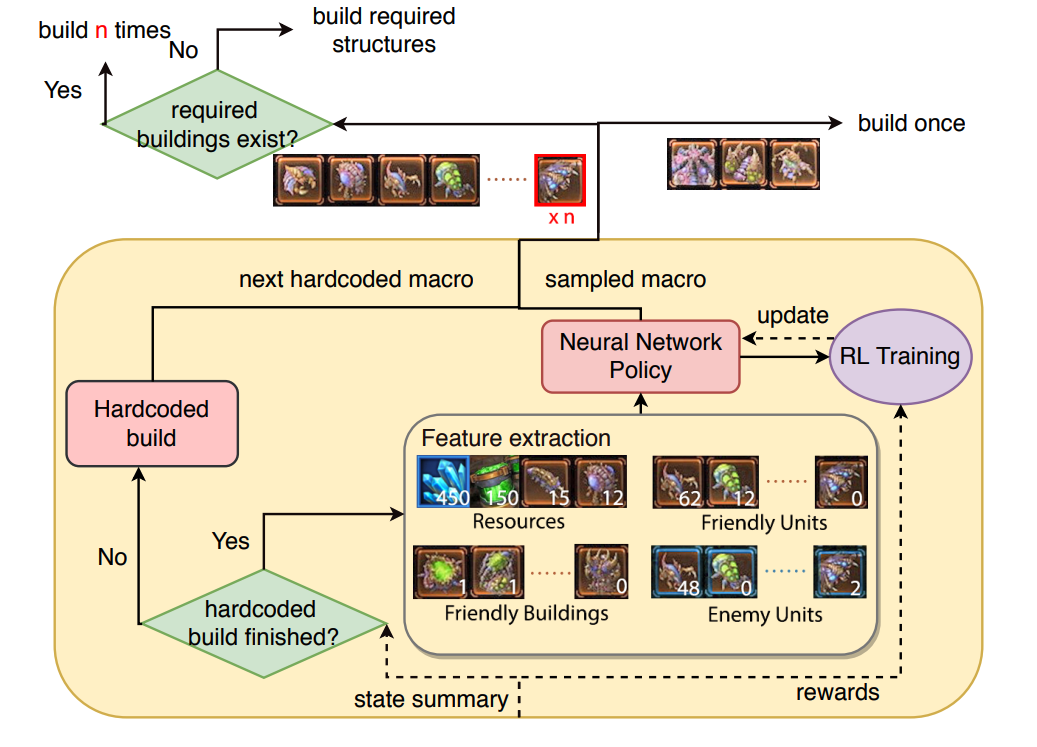
Haoran Tang*, Dennis Lee*, Jeffrey O Zhang, Huazhe Xu, Trevor Darrell, Pieter Abbeel.
Modular Architecture for StarCraft II with Deep Reinforcement Learning,
he 14th AAAI Conference on Artificial Intelligenceand Interactive Digital Entertainmen (AIIDE), 2018.